

产品讯息
32位微控制器实现先进控制技术
2014-11-06
| 作者:伟诠电子 罗久琅/林政良/顾朝奇 |
| 根据美国能源局的统计,全球的能源,大约一半是被电机所消耗,所以如何改善电机控制系统的耗能,便成一个重要的课题。而要降低电机的耗能,除了电机由交流电机走向直流无刷电机(BLDC)及电机本体的效能设计由IE1走向IE3之外,最重要的就是要有一个高性价比、高效能,且完全针对电机控制的专属微控制器。 |
| 藉由一个针对电机控制的专属高效能微控制器,我们可实现先进的控制算法。导入先进的控制算法,除了可以让系统达到节能之外,另外亦可以让整个控制系统在无传感器的情况下,可因应负载的变化做快速平滑的反应。传感器的配置,除了会增加组件及制造成本外,在很多场合是无法放置传感器的,例如压缩机内有化学物质及一些产品因空间太小而无法放置。本文就是使用一个32位微控制器来实现先进的磁场导向控制(FOC; Field Oriented Control) 、高频电压注入技术及空间向量PWM (SVPWM) 控制。 |
| 磁场导向控制系统 (FOC; Field Oriented Control) |
| 磁场导向控制 (FOC,又称向量控制; Vector Control) ,磁场导向控制发明的初衷,就在于想把交流电机的控制方式对比于直流电机的控制方式,直流电机的控制较简单,通过励磁电流和转矩电流的分别控制,可以简单且准确控制电机电磁转矩。 |
| 对感应电机进行磁场和转矩的解耦: 交流异步电动机由于变压变频,调频的时候电压不变,磁场会发生变化,调压的时候不调频,磁场也会发生变化,因此V/F只是一种非常粗略的控制磁场方式,根本达不到磁场的准确控制。 例如,在速度调节方面,V/F控制仅可达1%,而相对FOC可达0.001% (无感测FOC约为0.05%),在转矩调节方面,V/F控制非常差,而相对FOC可达± 2% (无感测FOC约为±5%)。当然相对而言,FOC需求较高运算能力的微控制器。图1. 是以伟诠电子32位微控制器为基础的磁场导向控制系统图,而针对内圈每一次的ADC中断,进行如下动作: |
| (1) 利用Clarke转换,将相电流由静态的三相转成静态的两相电流 |
| (2) 利用Park转换,将静态的两相电流转成动态的两相电流(旋转坐标系) |
| (3) 利用滑差模式 (Sliding Mode)控制器,计算出电机的速度及位置 |
| (4) 使用PI控制器,针对速度及电流进行控制 |
| (5) 利用Park逆转换,将动态的两相电流转成静态的两相电流(静止坐标系) |
| (6) 利用Clarke逆转换,将相电流由静态的两相转成静态的三相电流 |
| (7) 更新PWM输出占空比 |
| (8) ADC中断结束 |
| 高频电压注入估测 (High-frequency Voltages Injection Estimation ) |
| 电机的启动是PMSM 控制中的重要环节,PMSM 磁场导向控制(FOC)系统通过施加与转子磁场相垂直的转矩电流来确保电机的顺利启动,但这需要获知电机初始位置。大部分无位置传感器控制无法预知转子初始位置,一般采用开环启动或者将电机定位到预定位置启动。开环启动因不同角度起转,常发生的状况有逆偏、顿转等状况,而电机预定位要求则在很多产品是不适用的。 |
| 针对PMSM 零速/低速下的无位置传感器控制,为了解决低速时转子位置和速度估算不准确的问题,一般均采用,由美国威斯康辛大学的M. Corley及R. Lorenz两位教授于1996年首先提出的高频信号注入法,目前研究较多的是高频电压注入法。该方法是基于电机的凸极特性,其基本思考是在电机定子中注入高频电压信号,通过对高频电流响应进行特定的信号处理(滤波、角度估测器)来获得转子位置信息。 |
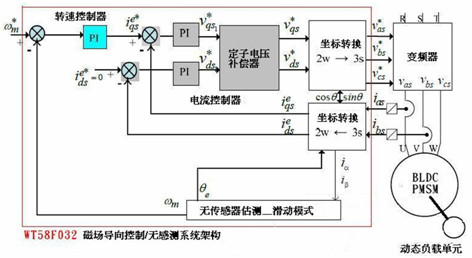 |
| 图1. WT58F032为基础的磁场导向/无感测控制系统架构图。 |
| 按照电压注入方式的不同,高频电压注入法可分为以下两类: (1) 旋转高频电压注入法: 在定子坐标系中注入旋转高频电压信号,则高频电流回应的负序分量中含有转子位置信息,通过对该信号进行解调获得电机转子位置。(2) 脉动高频电压注入法: 在估算的旋转坐标系注入脉动高频电压信号,则电流响应的高频分量中将包含位置估算误差,通过对该高频电流信号的处理,使得估算位置收敛于实际位置。一般高频电压信号设计为弦波之形式,并且注入于同步参考坐标d轴。 |
| 空间矢量脉冲宽度调变 (SVPWM; Space Vector PWM) |
| 空间向量PWM (SVPWM) 的工作原理是利用三组半桥逆变器,经由PWM调变电压向量来合成所欲产生之电机定子电流,此合成电流在定子线圈上产生旋转之定子磁通向量与转子磁通相互作用产生转矩,使得电机得以旋转。SVPWM因是以合成之定子磁通向量来决定三组半桥逆变器的切换时序,因此命名为空间向量脉宽调变。 这种调变方法是控制电压向量使得电机气隙旋转磁通向量轨迹逼近一个理想的圆,且有最小的磁通涟波,其转矩涟波 (Torque Ripple) 最低,因此在开路控制的情况下,电机转速涟波亦最小。 表1 为电机驱动电路的三组半桥逆变器功率开关组件,因为空间向量脉宽调变开关控制并无上下开关同时导通的定义,所以实际上可视为两种状态开关时序 (上开关OFF、下开关ON,或上开关ON、下开关OFF ) 。因此,三组功率开关组件,总共可产生八种开关状态组合,如表1所示。 |
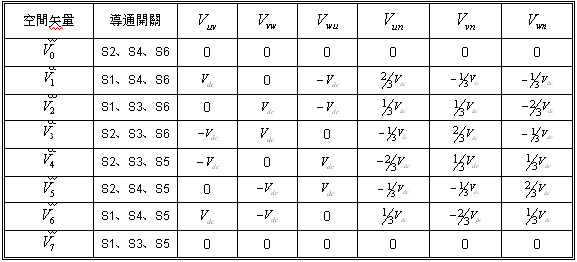 |
| 表1. SVPWM功率开关切换状态、线电压、相电压与空间向量之关系表。 |
| 空间向量脉冲宽度调变 (SVPWM) 控制系统 |
| 伟诠电子WT58F032微控制器为基础的SVPWM控制系统中,其控制流程如下: |
| (1) 主程序部份(Main Routine) |
| 甲、WT58F032复位 |
| 乙、WT58F032芯片初始化设定 |
| 丙、电机停止运转 |
| 丁、Check启动信号是否为”真” ,如为”真” ,进入初始化电机配置及致能中断,如为”假” ,则回到电机停止运转状态 |
| (2) 中断服务程序(Interrupt Service Routine) |
| 甲、中断服务程序启动 |
| 乙、输入捕捉单元/转子区间计算 |
| 丙、上述”乙”中计算的结果,输出给转速计算单元及电机相位计算单元 |
| 丁、上述”丙”中计算出来的转速,输出给电机相位计算单元及PID控制器 |
| 戊、上述”丁”中计算出来的电机相位及PID输出给正弦波产生器,以产生弦波 |
| 图2.为基于WT58F032的SVPWM控制输出波形 (M形状) ,由图中可看到,SVPWM的线电压利用率相较于一般的PWM会较高,所以达到节能的效果。 |
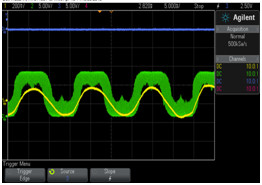 |
| 图2. WT58F032为基础的SVPWM控制输出波形。 |
| 总结 |
| 随着半导体技术的持续进步,微控制器能做的工作也愈来愈多,本文中,伟诠电子所提出的高性价比32位微控制器,除了有高运算能力的32-Bit RISC CPU及内建一个在一个指令周期就可完成32bx32b乘法运算的快速乘法器外,亦整合了针对电机控制所设计的周边电路,包括高速ADC、高速及多模式操作PWM、ADC和PWM连动、高速比较器、QEI等。另外,考虑到工业控制的需求,此芯片支持宽压工作,可运行于2.0V~5.5V,且有极佳的噪声耐受度,非常适合用在高效能电机控制系统。 |
| 本文也提出基于伟诠电子WT58F032微控制器所实现的FOC控制,并针对低速时,利用高频电压注入技术来侦测转子位置,同时亦使用空间向量PWM(SVPWM) ,来进一步提升线电压的利用率,进而达到节能效果。 |